soraeでは今年も宇宙開発や天文に関する注目のニュースをお伝えしてきました。そこで、2023年にお伝えしたニュースのなかから注目された話題をピックアップしてみたいと思います。今回は再び活発になりつつある月探査の動きに注目してみたいと思います!
※本記事は2023年12月21日時点での情報をもとにしています
■インドの月探査ミッション「チャンドラヤーン3号」が同国初の月着陸に成功

【▲ チャンドラヤーン3号のローバー「Pragyan」に搭載されているカメラで2023年8月30日に撮影されたランダー「Vikram」(Credit: ISRO)】
2023年の月探査最大のトピックはインド宇宙研究機関(ISRO)の月探査ミッション「Chandrayaan-3(チャンドラヤーン3号)」です。日本時間2023年8月23日21時32分、チャンドラヤーン3号のランダー(着陸機)は月の南極点から約600km離れた地点(南緯約69度・東経約32度付近)へ着陸(※)することに成功しました。インドとしては初めて、世界でも4か国目の月着陸成功で、月の南極付近への着陸は世界初となります。
※…天体への着陸はパラシュートやロケットエンジンを使って機体を減速させてから着陸する軟着陸(ソフトランディング)と、表面に激しく叩きつけられるように着陸する硬着陸(ハードランディング)に分けられることがありますが、本記事では軟着陸を「着陸」、硬着陸を「衝突」と表記しています。

【▲ チャンドラヤーン3号のランダー(着陸機)とローバー(探査車)(Credit: ISRO)】
2023年7月14日に「LVM-3」ロケットで打ち上げられたチャンドラヤーン3号は、月面に着陸するランダー「Vikram(ビクラム、ヴィクラム)」、ランダーに搭載されたローバー(探査車)「Pragyan(プラギャン)」、着陸前までの飛行を担う推進モジュールの3機で構成。ランダーには地震計(月震計)など3基、ローバーにはX線分光器など2基、推進モジュールにも1基の観測装置が搭載されています。

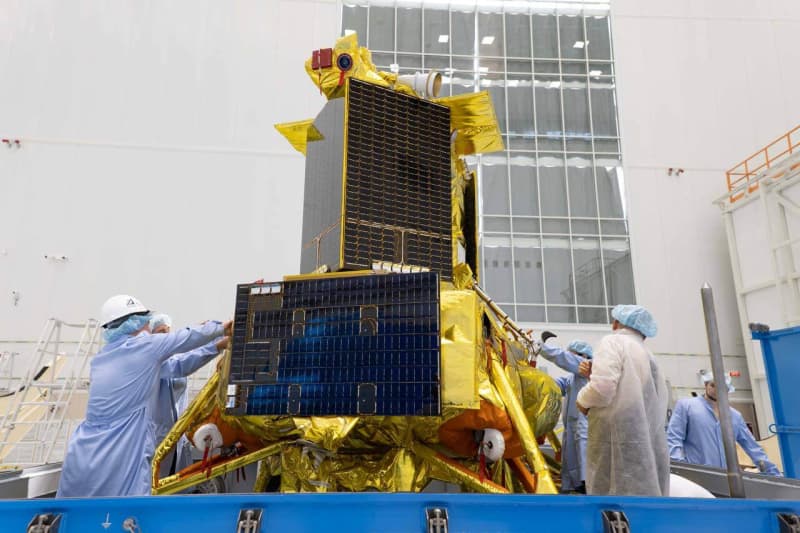
【▲ 打ち上げ準備中に撮影されたチャンドラヤーン3号の探査機。ランダー(上)と推進モジュール(下)が結合された状態(Credit: ISRO)】
チャンドラヤーン3号の月面でのミッション期間は、月での半日に相当する14日間でした。ランダーとローバーによる探査活動は着陸後間もなく開始され、着陸地点の表面下数cmまでの温度や元素組成などが調べられた他に、将来のサンプルリターンや有人ミッションを見据えてランダーを数十cmだけ上昇・接地させる実験が実施されました。
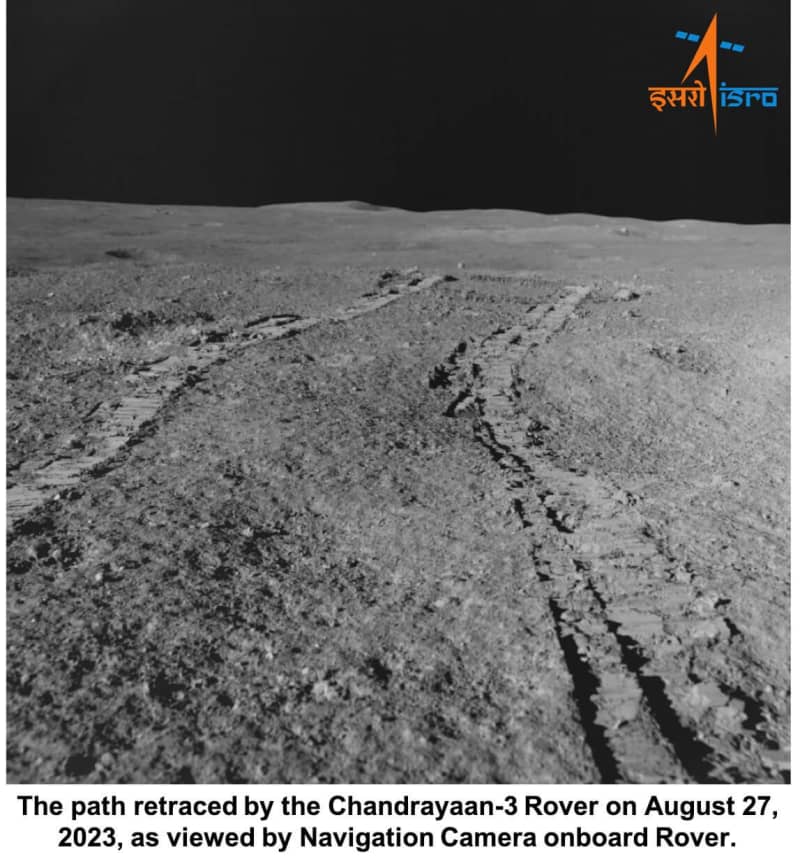
【▲ チャンドラヤーン3号のローバー(探査車)に搭載されているカメラで2023年8月27日に撮影された月面。ローバーが付けた轍(わだち)が写っている(Credit: ISRO)】
太陽電池から電力を得ていたランダーとローバーは、着陸地点が夜を迎える前の2023年9月4日までにスリープモードに入りました。ISROによれば、チャンドラヤーン3号ミッションの目的は完全に達成されたということです。ランダーとローバーは着陸地点が夜明けを迎える2023年9月22日頃に目覚める可能性も期待されていましたが、その日を迎えてもランダーからの信号は受信されませんでした。

【▲ 2023年8月5日にチャンドラヤーン3号の探査機から撮影された月面の様子。ISROが公開した動画から引用(Credit: ISRO)】
なお、2023年8月17日にランダーから切り離されたチャンドラヤーン3号の推進モジュールは今も運用が続けられていて、2023年11月10日には地球を周回する高軌道へ戻されました。推進モジュールには将来の太陽系外惑星探査に備えて地球を観測する偏光分光観測装置が搭載されており、今後も運用が継続される予定です。
関連記事
・インド、月面探査ミッション「チャンドラヤーン3号」の打ち上げに成功(2023年7月14日)
・【速報】インド月探査機「チャンドラヤーン3号」月面着陸成功(2023年8月23日)
・インド月探査機「チャンドラヤーン3号」着陸後初撮影の画像公開(2023年8月24日)
・ランダーから降りるローバーの動画が公開 インド月探査機「チャンドラヤーン3号」続報(2023年8月26日)
・インド月探査機「チャンドラヤーン3号」ローバーのカメラで撮影した画像公開(2023年8月29日)
・インド月探査機「チャンドラヤーン3号」ローバーのカメラで撮影したランダーの画像公開(2023年8月31日)
・チャンドラヤーン3号のランダーとローバーはスリープモードに 着陸地点をNASA月周回衛星が撮影(2023年9月7日)
・長い夜が明けて着陸機と探査車は応答せず インド月探査「チャンドラヤーン3号」続報(2023年9月28日)
・インド月探査「チャンドラヤーン3号」月を周回していた推進モジュールが地球周回軌道に再投入(2023年12月8日)
■民間企業初の月着陸に挑んだispace「HAKUTO-R」ミッション1

【▲ 月面へと降下するランダーの想像図。ispaceが公開している動画より(Credit: ispace)】
今年月着陸に挑んだのはチャンドラヤーン3号だけではありません。日本時間2023年4月26日0時40分、株式会社ispaceの月面探査プログラム「HAKUTO-R」ミッション1のランダーが日本初・民間企業初の月着陸成功を目指して月周回軌道から降下を開始。着陸予定時刻は同日1時40分頃でしたが、ランダーは月面に衝突して失われました。

【▲ 2023年4月25日1時40分の着陸予定時刻から5分後、ランダーの状況確認を進めるispaceのミッションコントロールセンターの様子。ispaceのライブ配信から(Credit: ispace)】
HAKUTO-Rミッション1は「ランダーの設計及び技術の検証」と「月面輸送サービスと月面データサービスの提供という事業モデルの検証及び強化」を目的としており、ランダーは「氷の海」の南東に位置するアトラス・クレーターに着陸する予定でした。ランダーにはアラブ首長国連邦(UAE)ムハンマド・ビン・ラシード宇宙センター(MBRSC)の月面探査車「Rashid(ラシード)」や、株式会社タカラトミー等が開発した変形型の月面探査ロボット「SORA-Q(LEV-2)」など、合計7つのペイロードが搭載されていました。

【▲ UAEの月面探査車「Rashid」の想像図(Credit: MBRSC)】
ミッション1ランダーは2022年12月11日にスペースXの「Falcon 9(ファルコン9)」ロケットで打ち上げられ、2023年3月21日に月周回軌道へ到達しており、着陸前までは順調に運用されていました。ispaceによると、ミッションの計画段階で着陸地点を変更したことに起因するソフトウェアの問題によって、クレーターの縁の上空を通過したランダーの実際の高度と推定高度にkm単位の誤差が生じたことが着陸失敗の原因だとされています。推定高度ゼロ、すなわち月面に到達したとランダーが判断した時点での実際の高度は約5kmであり、接地するまでゆっくりと降下する間に推進剤が尽きたランダーは月面に衝突したとみられています。
関連記事
・スペースX、ispaceの月面探査プログラム「HAKUTO-R」ミッション1ランダーとNASAの小型探査機を打ち上げ(2022年12月11日)
・無人月着陸船の月周回軌道投入に成功! 民間月探査プログラム「HAKUTO-R」ミッション1(2023年3月22日)
・民間企業初!4月26日未明の月面着陸迫る 民間月探査「HAKUTO-R」続報(2023年4月25日)
・月着陸船との通信確立できず成否は不明 民間月探査「HAKUTO-R」続報(2023年4月26日)
・月着陸船は推進剤が尽きて月面に落下か 民間月探査「HAKUTO-R」続報(2023年4月26日)
・月探査機で撮影したランダー着陸予定地点付近の画像をNASAが公開 民間月探査「HAKUTO-R」続報(2023年5月24日)
・月面着陸に至らなかった原因はソフトウェアにあり 民間月探査「HAKUTO-R」続報(2023年5月26日)
■旧ソ連時代以来47年ぶりの月着陸を予定していたロシアの「ルナ25号」
【▲ 打ち上げ準備中に撮影されたロシアの月探査機「ルナ25号」(Credit: Roscosmos)】
日本時間2023年8月11日、ロシアの宇宙機関ロスコスモス(Roscosmos)が月探査機「Luna 25(ルナ25号)」を打ち上げました。ルナ25号は旧ソ連時代の1976年に打ち上げられた「ルナ24号」以来、ロシアにとって47年ぶりの月探査ミッションです。
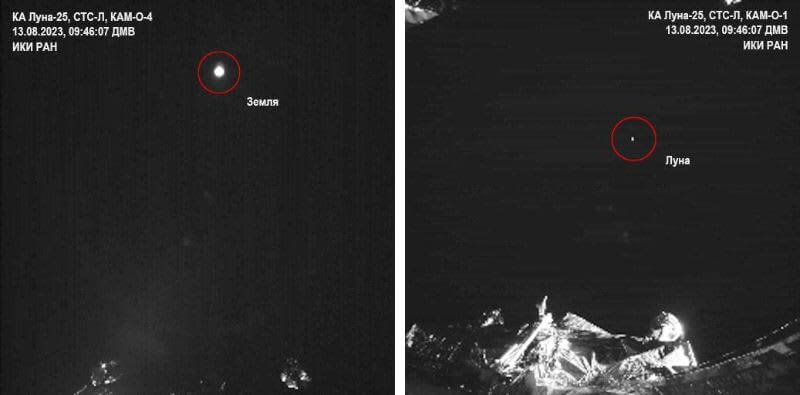
【▲ ルナ25号に搭載されているカメラで2023年8月13日に撮影された地球(左)と月(右)。地球から約31万km離れた位置で撮影(Credit: IKI RAN)】
ルナ25号はインドのチャンドラヤーン3号に先立つ2023年8月21日に月の南極域にあるボグスラフスキー・クレーターの北側へ着陸し、月の土壌(レゴリス)の採取と組成の分析を実施する予定でした。しかし、2023年8月19日に着陸前の軌道へ遷移させる操作が実施された際に通信が途絶しており、予定外の軌道へ遷移したことで月面に衝突したとみられています。
関連記事
・ロシア、月探査機「ルナ25号」打ち上げ成功 月面着陸は8月21日の予定(2023年8月11日)
・ロシア、月探査機「ルナ25号」の月周回軌道投入に成功 着陸は8月21日の予定(2023年8月17日)
・【速報・更新】ロシアの月探査機「ルナ25号」で問題発生 月面に衝突か(2023年8月20日)
・NASA、ロシアの月探査機「ルナ25号」が衝突したとみられる地点の画像を公開(2023年9月4日)
■月探査の新時代到来か 2024年のミッションにも注目
チャンドラヤーン3号の着陸成功に象徴される2023年の月探査は一過性の動きではありません。南極域などの永久影(太陽光が届かない範囲)に氷(水の氷)が埋蔵されているとみられる月は今、宇宙機関だけでなく民間企業によるものも含めた探査ミッションが幾つも計画されています。米ソの宇宙開発競争が繰り広げられた1960~70年代から半世紀、月は新たな宇宙開発競争の舞台となりつつあります。

【▲ 月面に着陸した小型月着陸実証機「SLIM」の想像図(Credit: JAXA)】
注目は宇宙航空研究開発機構(JAXA)の小型月着陸実証機「SLIM」です。JAXAのX線分光撮像衛星「XRISM」とともに「H-IIA」ロケット47号機で2023年9月7日に打ち上げられたSLIMは、2023年12月25日に月周回軌道へ到着し、早ければ日本時間2024年1月20日0時20分頃に月面へ着陸する予定です。成功すれば日本として初めて、世界でも5か国目の月着陸成功となります。

【▲ 月面に到達した小型ローバー「LEV-1」(左)と「LEV-2」(愛称SORA-Q、右)の想像図(Credit: JAXA)】
なお、SLIMには2機のローバー(探査ロボット)「LEV-1」と「SORA-Q」が搭載されています。SORA-QはHAKUTO-Rミッション1ランダーに搭載されていたのと同じものです。LEV-1にはバネの力で月面を蹴ってホップ(跳躍)するためのパッドが、SORA-Qには外殻を兼ねる2つの車輪が備わっていて、どちらもバッテリーが続く限り月面を移動することが可能(LEV-1は太陽電池も装備)。2機のローバーはSLIMの着陸直前に分離されて月面に到達し、月面での画像取得や地球へのデータ送信を連携して行う予定です。

【▲ アストロボティック社の月着陸船「Peregrine(ペレグリン)」のフライトモデル(実機) (Credit: ULA)】
民間企業初の月着陸にも注目です。2024年1月にはアメリカの民間企業アストロボティックのランダー「Peregrine(ペレグリン)」が、同年2月には同じくアメリカの民間企業インテュイティブ・マシーンズのランダー「Nova-C」が打ち上げられる予定です。日本のispaceも早ければ2024年冬に次のミッション「ミッション2」のランダー打ち上げを予定しています。

【▲ インテュイティブ・マシーンズ社の月着陸船「Nova-C」のフライトモデル(実機) (Credit: Intuitive Machines)】
また、NASAは有人月面探査計画「Artemis(アルテミス)」2回目のミッション「Artemis 2(アルテミス2)」を早ければ2024年11月にも実施することを計画しています。アルテミス2は新型宇宙船「Orion(オリオン、オライオン)」が初めて有人で飛行するミッションで、4名のクルーを乗せたオリオン宇宙船は月周辺を飛行した後に地球へ帰還する予定です。

【▲ 「アルテミス2」ミッションに参加する4名のクルー。NASAのクリスティーナ・コック宇宙飛行士(左)、ビクター・グローバー宇宙飛行士(中央上)、リード・ワイズマン宇宙飛行士(中央下)。CSAのジェレミー・ハンセン宇宙飛行士(右)(Credit: Josh Valcarcel)】
関連記事
・JAXAの月探査機「SLIM」2024年1月20日に月着陸へ 成功すれば日本初(2023年12月6日)
・インテュイティブ・マシーンズ、月着陸ミッション「IM-1」の打ち上げは2024年1月12日以降に 目標は月南極域のクレーター(2023年11月10日)
・米民間企業の月着陸船「ペレグリン」がケープカナベラルに到着 ヴァルカンロケット初飛行で月へ(2023年11月7日)
・NASAがアルテミス2ミッションに参加する宇宙飛行士を発表 月周辺の有人飛行は半世紀ぶり(2023年4月4日)
文/sorae編集部
