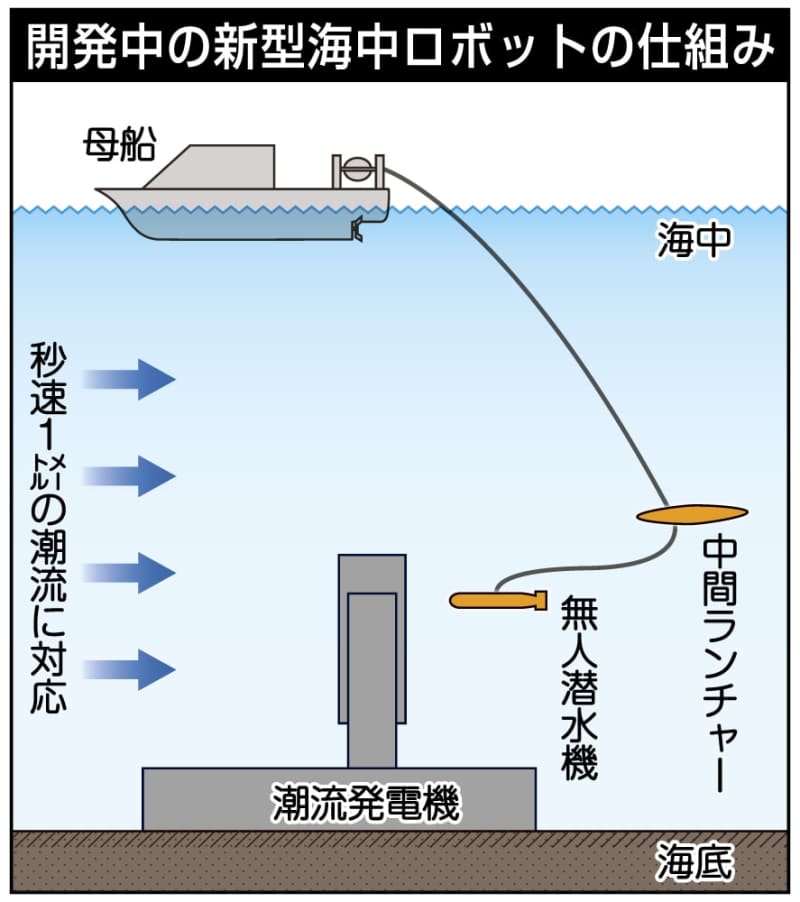
長崎総合科学大(長崎市)大学院の野瀬幹夫客員教授(65)=船舶工学=らの研究グループが、強い潮流の中で稼働できる新型海中ロボットの研究開発を進めている。現状は潮流がほとんどない中でしか稼働できないが、同グループは、母船と海中ロボをつなぐケーブルの途中に、「中間ランチャー」という中継機を設けて強い潮流に対応する初の方式の実用化を目指している。昨年度、試作機が完成し、本年度から海中での試験に着手する。
この研究開発は、県と同大などの産学官が2016年、海洋再生エネルギー分野で連携協定を結び、本県海域の拠点化を目指して関連技術の開発を進めている取り組みの一環。海中の潮流発電機の保守点検や観測調査への活用を想定しており、開発に成功すれば発電コストの低減に役立つとしている。
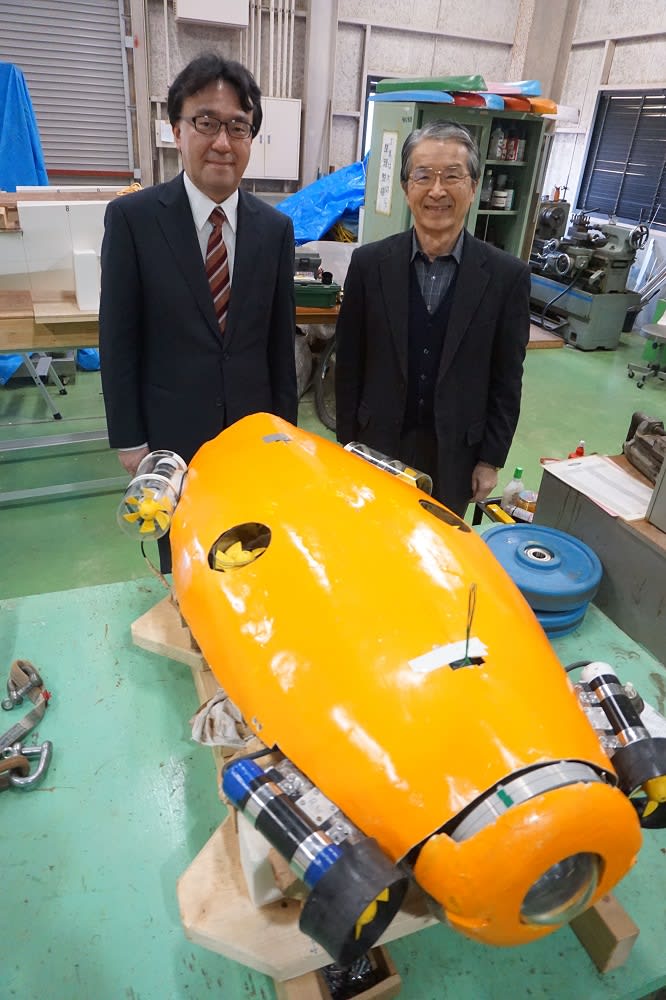
同グループのメンバーは野瀬氏や、工学部の古野弘志准教授(46)ら。16年度に着手し、17年度から同大の戦略的研究予算を活用した重点研究の一つとなっている。
海中ロボは、バッテリー、映像撮影用カメラ、小型コンピューターなどを内蔵し、母船からの遠隔操作で動く無人潜水機(ROV)。ケーブルを通じて送られた映像を母船で見ながら点検や作業ができる。潮流発電機の保守点検は、潮流の影響で稼働時間が短いと完了に時間がかかり、母船の運航コストを含めた費用がかさむという課題がある。
中間ランチャーは、母船から延びたケーブルを潮流が押し流そうとしても、海中で一定の位置を保つ装置を想定。中間ランチャーがあることで、下方にケーブルでつながっているROVが動いたり、静止したりしやすくなるという。
完成したのはROVの試作機で長さ約110センチ、幅約40センチ、高さ約25センチ。流線形の強化プラスチック製の外殻の中に、機器類が入る円筒形のアルミ製防水・耐圧容器がある構造。機体各所に計6機の電動スクリューを備え、前後左右、上下の移動や静止が可能。本年度から実際に海中に沈めて強度や性能を確認する試験に入り、その後は中間ランチャーの設計、製作、調整などに移る。
試作機は秒速1メートルの潮流まで耐えられる計算。この試作機でデータを収集した後に外部資金の導入を図り、20年度ごろまでに、秒速2メートルの潮流下で稼働できる試作機を開発し、実用化を目指す。6月に長崎市で開かれる日本船舶海洋工学会で経過を報告する。
野瀬氏は「コスト面でも実用化可能で、社会に実際に役立てることができる技術。開発を急ぎたい」と話す。