国際ロボット展2019において、デンソーウェーブとベッコフオートメーション(以下ベッコフ)が共同開発した新しいコンセプトのロボットコントローラー「RC9」の共同会見が行われ、背景や目的について説明された。
会見の様子は以前の記事で紹介したが、今回はベッコフ側の視点から、ロボットコントロールをIPC上のオープンな環境で実行するメリットなどについて、ベッコフオートメーション コーポレートマネジメント ゲルド・ホッペ氏(写真中央)、ベッコフオートメーション 制御システム&通信アーキテクチャ部門 シニアマネジメント トーマス・レティッグ氏(写真右)、ベッコフオートメーション株式会社 代表取締役社長 川野俊充氏(写真左)に話を伺った。
(聞き手、IoTNEWS代表 小泉耕二)
IoTNEWS 小泉(以下、小泉):まずはベッコフとして今回の取り組みをどのように見ているのかお聞かせください。
ベッコフオートメーション ゲルド・ホッペ氏(以下、ゲルド):今回デンソーウェーブと共同開発を行なったことで、デンソーウェーブ自身が、ロボットコントローラー開発の考え方そのものを大きく変えたということが重要な位置付けだと考えています。
今までは、内製で「独自のハードウェア」に「独自のソフトウェア」を入れ、それを「専用品」という形でユーザー企業に提供していました。
それを、ユーザー自身のノウハウや制御ロジックを、ベッコフのオープンプラットフォームの上に実装するという考え方に変わりました。
その結果、ユーザーのノウハウを様々な形で再販したり、ライセンスしたりといった、選択肢を持ち、汎用的に使えるようになりました。
こういった、ハードウェアベースのアーキテクチャから、ソフトウェアベースのアーキテクチャに変わった、というところが一番大きいことになります。
仮に、専用品で作り続けている場合、バージョンアップなどの際の工数も増え、性能や機能に制約が出てきてしまいます。
小泉:個人的には、以前から、Windows上のミドルウエアで、リアルタイム実行環境となる「TwinCAT」の存在は知っていたのですが、これまではPLCなどをリアルタイム実行環境で制御しているというイメージでした。
そして今回「RC9」という新たなロボットコントローラーに「TwinCAT」が採用されたということですが、今まではロボットコントローラーにリアルタイム実行環境が使われていなかったということでしょうか。
ゲルド:リアルタイム実行環境としての「TwinCAT」は、以前からリアルタイムアプリケーションを開発することができました。
50マイクロ秒といった、非常に短いサイクルタイムでも実行できるようなソフトウェアを自由に開発することができます。
基本的に「TwinCAT」は、PLCやIOといった要素に対して、リアルタイムの実行環境を実現することができます。
独自のリアルタイム実行環境の上に独自のソフトを組むこととの違いは、お客様はすでにある様々な機能を拡張することもできれば、一部を置き換えて作り込むこともでき、それを統合的に開発してパッケージングすることができることです。
特に今回デンソーウェーブは、ベッコフのロボットコントローラーのソフトウェアパッケージをそのまま使うのではなく、自社でプログラミングをして作り込んで、製品に落とし込んでいます。
シーケンス制御の部分やロボットなどを、自社で開発したモジュールを使って1つのハードウェアに統合することができます。さらに、現在ない機能もユーザ自身が開発して搭載するということもできるのです。
一般的なロボットコントローラーの場合、専用ツールに専用モジュールを入れることはできるのですが、そのモジュールを作るのに、ロボットメーカーにお願いして作ってもらわないといけません。

それに対し、ベッコフの「TwinCAT」は、Visual Studioという誰もが使える開発用ツールの中に組み込まれているので、ないものは自分で自由に開発していただくことができます。
このようにオープンな開発環境があるというところが一番大きな特徴です。
そしてこのソフトウェアの開発環境だけではなく、ハードウェアの進化にも追従していくということも非常に簡単です。
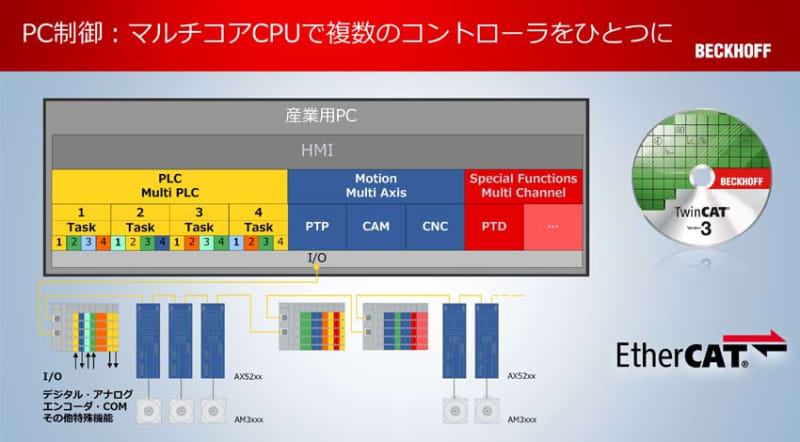
例えばデンソーウェーブの場合ですと、採用されたIPCには4つのコアがあります。こういったマルチコアの場合、あるコアにはPLCのシーケンス制御を、またほかのコアにはロボットに必要な制御をと割り当てることも可能です。
このように、各コアに異なる機能を自由に搭載することができるのことで柔軟性が高まり、開発者にとっては嬉しい環境となります。
さらに、今回採用していただいていたベッコフのIPCは、一番小型のAtomプロセッサーが乗っているコントローラーで、これを標準品としてデンソーウェーブは販売します。
これをベースとした上で、必要な性能が足らないということであれば、より大型で高性能なIPCにするという選択肢があるため、性能アップも簡単です。
小泉:以前双腕ロボットに取り組まれていたと思うのですが、このようなものが出てくると双腕である必要はなくなるのではないでしょうか。
1つの頭脳で2つの腕を動かさなくても、別々の2つの腕を一つのIPCで制御すればよい、ということになります。
ゲルド:そうですね。ユーザにとっては、いろんな制限を取り払い、制御にフォーカスすることができるということが、一番のメリットだと思います。
今までは自社で全ての機能をアプリケーションに組み込まなければならなくて、IoTやAIといったこともすべて一社でやらなければなりませんでした。
開かれた環境開発であることがエンドユーザーにとっても一番のメリットになり、デンソーウェーブにとってもロボットの制御だけにフォーカスすることができ、ロボット開発の統合環境そのものを商品としてユーザーに提供できるので、Win-Winの関係を作ることができます。
小泉:ソフトウェアを載せ替えるだけで違う業種に適用することもできますね。
ゲルド:もちろん今までと同じ買い方や使い方もできます。ただ、もっとたくさんのロボットを動かしたいとき、ロボットのモーターを付け加えたり、リニア制御したりと、やりたい要望に合わせて我々の製品を使っていただくこともできます。
様々なものが融合して、ユーザーが自由に使えるという点は、とても注目を集めていると思っています。
小泉:ネットワークの話も少し出てきましたが、ロボットの制御だと、産業用の高速通信ネットワークである、「EtherCAT」が必要になってくるかと思います。
しかしたとえばカメラなどの制御を行う際は他のネットワークでも機能すると思うのですが、そこの互換性は「TwinCAT」は大丈夫なのでしょうか。
トーマス・レティッグ(以下、トーマス):今回の「RC9」で採用されたのは、通常の100MbpsのEtherCATという17年の実績がある非常に安定した技術です。
ただおっしゃっていたようにカメラや多軸のスライダのようなものの制御となると、100Mbpsだと帯域が足りなくなってきます。
そこでベッコフは、EtherCAT 1GやEtherCAT 10Gといった今年発表された製品で、広い帯域のネットワークに関しても、互換性を損なわず拡張していくことができることを担保していきます。
我々自身も産業のカメラを製品化していくという予定もありますし、そういったものを選択肢の1つとして「RC9」のユーザーに提供していく予定です。
さらに、ベッコフ自身も、様々なネットワークにつなげるためのゲートウェイ、ゲートターミナルが30種類ほどあります。今回CC-Link対応のゲートウエイも発表したのですが、他社とのネットワークの互換性も重視しています。
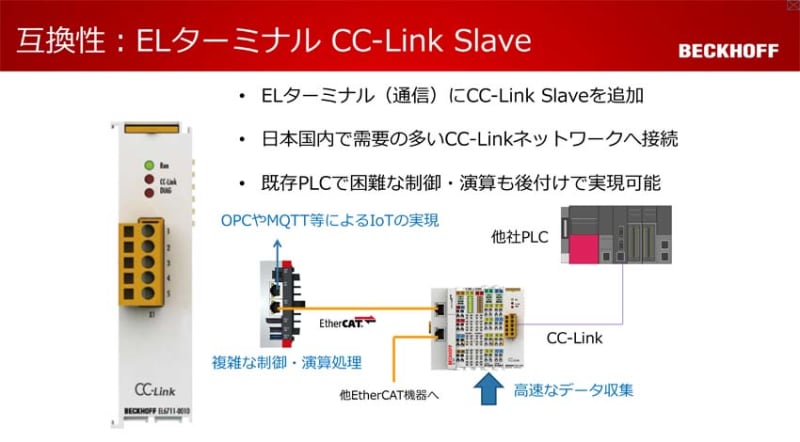
これまでの製品の場合、ゲートウェイはPCIのカードになっていて、パソコンの本体に刺さなくてはいけませんでした。
しかし今回発表したゲートウエイは、ケーブルの先に置けばいいだけなので、必要なところにこれを置いて、そこから短いケーブルでデバイスをつないであげれば無駄なケーブルがいらなくなります。
小泉:どこかのメーカーのものでないと使えないという閉鎖的なところから、オープンな実行環境が出てきて、オープンなネットワークが出てくればITの世界のように、自由に作って組み立てられる。
統治制御、協調制御のようなことも自由にできるという世の中が来そうですね。
ゲルド:選択肢を与えるということですよね。今までのRC1〜8では、世代ごとに全て開発をしなければならず、機能追加を依頼されるたびに追加開発をやらなければならなかったのですが、「TwinCAT」ベースなったことで、依頼されたものをすぐ作るという従来のやり方も受け付けられますし、ご自分でもできますよということを言えるようになりました。
機械学習やマシーンラーニングを自社で実装するのは大変な労力なので、我々が引き受けるという、役割分担をソフトウェアベースで行うということです。
実は、ベッコフも1986年に、モーション用のボードというハードウェア製品を出していたのですが、それを制御するには、ハードウエアに直接プログラミングするより、高速なCPUの搭載されたPC上に構築したの方が早いということに気がつきました。
そこでハードウェアでの制御をやめて、ソフトウェアベースでリアルタイムに制御するという「TwinCAT」構想が始まったのです。当時我々が気づいた判断を進化させた形で、現在デンソーウェーブが取り組まれているという解釈をしています。
小泉:川野さんは、国内の展開はどう考えられていますか。
川野:IIoTやAI、画像処理のリアルタイム実行といったソフトウェアの複合化や、複数アームの協調制御やリニア搬送機などとの同期制御のニーズが加速的に増えている先進的な日本の製造業の現場において、無限とも言える拡張性を備えたRC9は設備の価値を高める新たなアーキテクチャとして歓迎されることと確信しています。
後方互換性を前提とした設計となっていることも普及の後押しとなるはずです。
小泉:ITの世界に起きた民主化の流れが、制御の世界にも起きる兆しを感じました。ありがとうございました。

