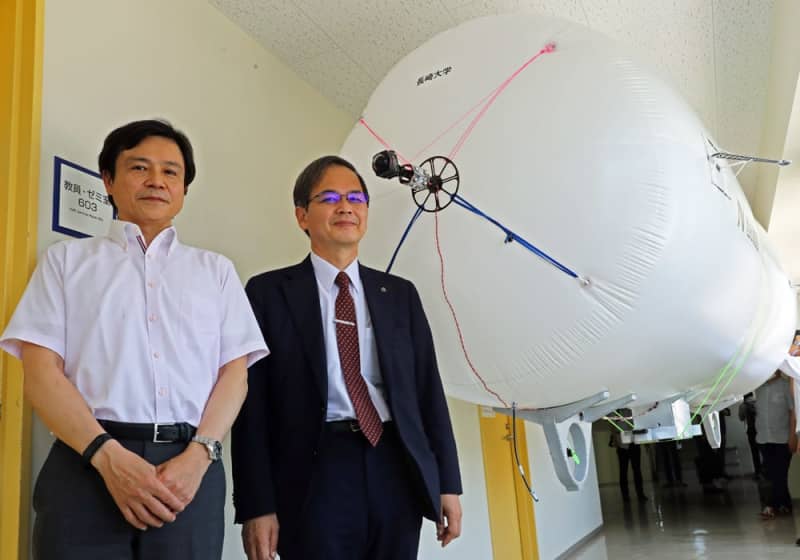
長崎大(長崎市)と西松建設(東京)は先月、共同開発した飛行船型の無人調査ロボット「トンネルマンボウ」を公開した。水力発電所の水路トンネル内を自動で飛び、内部の壁面を撮影する。開発に当たった山本郁夫・同大海洋未来イノベーション機構教授(副学長)は飛行、海洋、医療と多彩な分野で機器を開発してきた専門家。試行錯誤の末に課題を克服し、幅が狭く長距離のトンネルで活躍できる性能を実現させた。
◇最長6キロ飛行
「自律(飛行)で長距離を点検できる成果が上がった」。6月、長崎大で記者会見した山本教授はこう述べ、昨年12月、熊本県の全長2.6キロの水路トンネルで飛行試験に成功したことを報告。同席した西松建設技術研究所の原田耕司主席研究員は「理論上6キロまで調査可能」と胸を張った。
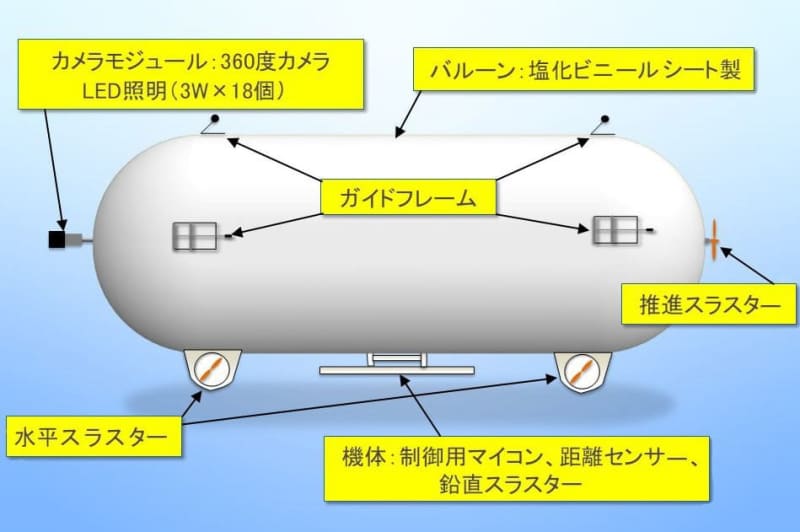
トンネルマンボウは全長3.7メートル、直径1.2メートル。塩化ビニールシート製の船体の下部の箱にマイコンやセンサー、バッテリーを搭載。電力で後部の推進用と下部の水平、鉛直各2個のプロペラ(スラスター)を動かす。センサーで壁面との距離を測り、トンネル内をぶつからずに自動で推進。先端に装備した360度撮影可能なカメラの映像で、壁面の亀裂などを確認する仕組み。
点検は従来、人が入って行うのが一般的。無人調査機は水上を進む浮体型ロボットなどがあったが、飛行船型は初めてだ。
◇地震が契機に
開発のきっかけになったのは、2016年の熊本地震だった。同社に当時、地震で壊れた水路トンネルの無人調査の打診があった。人が入るのは危険な上、損傷による漏水で水が流せず浮体型が使えない状態だった。同社にも可能な技術はなく、別の技術開発で連携していた山本教授に相談し開発が始まった。
水力発電所は100年以上前から国内各地で建設され、老朽施設が現役で稼働している所が多い。同社によると、国内の水力発電所の水路トンネルの総延長は4700キロに及び、無人点検は需要が見込める。ただ、開発は過酷な調査環境の克服が課題となった。
◇省エネルギー
水路トンネルは多くが長さ2キロ以上に及び、幅は2~3メートルと狭くカーブもある。ドローンは長距離飛行が困難な上、狭いトンネル内ではプロペラが起こす風を制御できず、飛ぶことができない。そこで着目したのが少ないエネルギーで飛ぶことができ、重い物も搭載可能な飛行船型だった。
山本教授は元三菱重工業(東京)の研究者で、船や飛行機の技術開発や研究統括を担当。力学や運動制御が専門。波のある海上で船体が揺れない仕組みや水中翼艇、深海潜水艇の開発など数々のプロジェクトに携わった。1980年代に、魚のひれと同じ仕組みの推進システム(弾性振動翼)を開発し、これを組み込んだユニークな「魚ロボット」を製作。世界から注目された。
2004年に退職後、北九州市立大などを経て13年に長崎大に着任。他学部や外部企業と連携して、実用ロボットの開発を推進してきた。これまでに女神大橋(長崎市)の橋りょう検査用飛行ロボット、医学部と共同開発の先端医療用器具などが実用化されている。
◇「信念」で実現
「力学が頭に入っているので『こうやればこうなる』という仕組みは、すぐ頭に浮かぶ。ところが、実現にはいつも苦労を伴う」と山本教授。今回もトンネル内で試験を重ね、センサーの情報から素早く姿勢を変えられるように装置を改良したり、壁面にぶつかって船体を傷つけないよう、側面に触覚のような金属製の棒(ガイドフレーム)を取り付けるなど工夫を凝らした。「何度も失敗したが、信念でやれば最後はできる」と振り返った。
「トンネルマンボウ」は今後、西松建設が事業に活用する。原田研究員は「各パーツを分解して狭いトンネルに持ち込めるなど、作業性もいい。水流がない中での(無人点検の)技術は、ほかにはない」と話した。