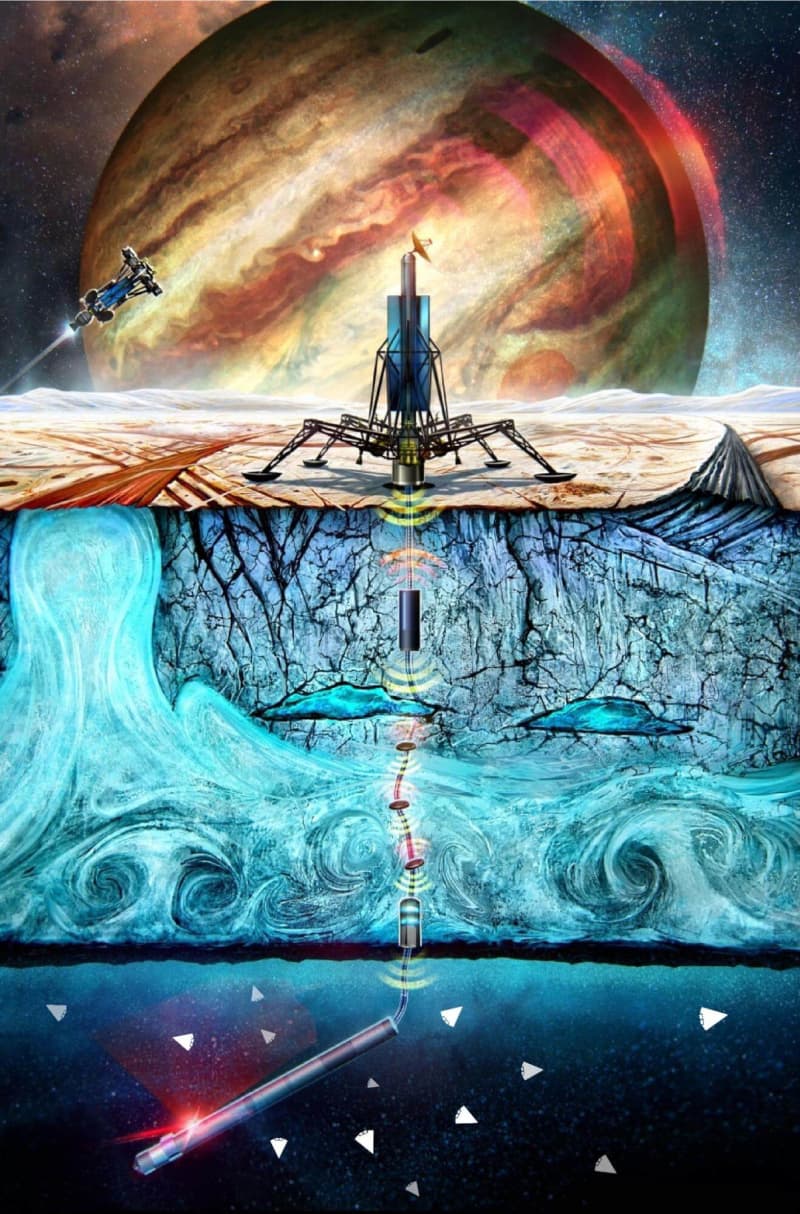
【▲小型クライオボット「SWIM」が氷衛星の内部海を潜るイメージ(Credit: NASA/JPL-Caltech)】
土星の「エンケラドゥス」や木星の「エウロパ」といった氷衛星では、何kmもの厚さがある氷の外殻の下に海があり、生命が存在する可能性もあると考えられています。こうした衛星の内部海を探査するために、50個程度の小型遊泳ロボットで構成される「集団」が研究・開発されているようです。
アメリカ航空宇宙局(NASA)は革新的なコンセプトに対して支援する「NIAC(NASA Innovative Advanced Concepts)」プログラムにて、NASAのジェット推進研究所(以下、JPL)で研究・開発が進められている小型の遊泳ロボット群のアイディアを2022年のフェイズIIのひとつに選定し、60万ドルを与えることを決定しました。
関連: NASAが目指すソーラーセイル どこが革新的なのか?
JPLでは、氷衛星の海を探査するロボットとして、氷の外殻を貫通できる「クライオボット」の研究が続けられてきました。クライオボットのアイディアは半世紀以上前の1960年代に登場し、JPLは1998年の秋に木星の衛星エウロパの探査を目的としたクライオボットの設計を開始しました。JPLによると、クライオボットの全長は1.25m、直径12cmで、搭載したセンサーで収集されたデータをもとにオペレータ―が操縦するといいます。
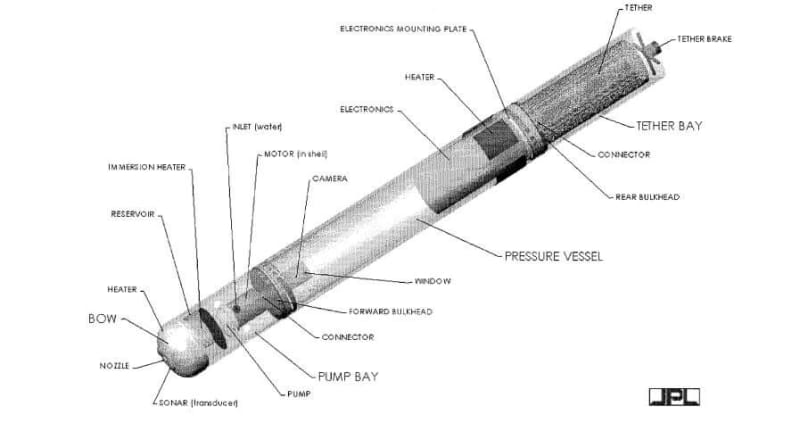
【▲クライオボットの構造を示した模式図(Credit: Zimmerman, Bonitz, and Feldman (2001)】
しかし、JPLのEthan Schaler氏は、クライオボットに小さなロボット「SWIM(Sensing With Independent Micro-Swimmers)」を数十機搭載することを提案しています。SWIMの全長は約12cm、容積は60~75立方cm程度しかありませんが、各ロボットにはコンピュータや駆動装置、超音波の通信システム、温度や酸性度(pH)、圧力などを計測できる、さまざまなセンサーが搭載されるようです。
Schaler氏によると、「ミニチュア化したロボットを、太陽系を探査するための新しい手法として採用するとすればどんなケースになるだろうか?」という問いが、小型遊泳ロボット集団のアイディアを考えるきっかけだったといいます。
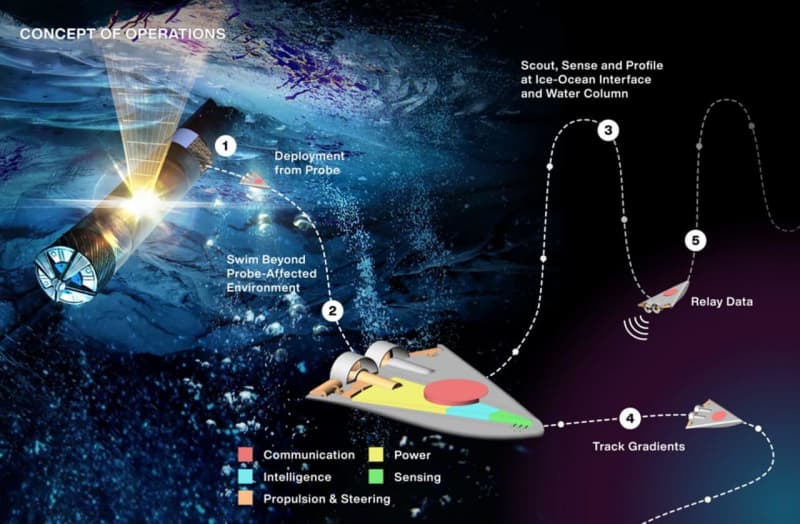
【▲小型クライオボット「SWIM」の操縦プロセスを示す模式図(Credit: Ethan Schaler)】
Schaler氏によると、もしも内部海に生命が存在していたとしても、数年を要して氷を貫通した場所では生命の兆候を検出できない可能性にどう対処すべきかという課題が、従来型のクライオボットにはあったようです。いっぽう、Schaler氏が提案するSWIMを搭載したクライオボットには、1機では対応できない広範囲を複数のロボットで探査できるメリットがあります。また、複数のロボットによって得られた計測結果を重ね合わせることで、観測データの潜在的なエラーを減らすことも可能になるといいます。
NASAによるとSWIMは研究段階であり、ミッションとして採用されたわけではありません。NASAは2024年に打ち上げ予定の探査機「エウロパ・クリッパー」で収集されたデータが、SWIMを配備するミッション開始に役立つだろうと考えています。
Source:
- Image Credit: NASA/JPL-Caltech
- Space.com \- Swarms of tiny robots may one day explore oceans on other worlds
- Space.com \- Tunneling Cryobot Robot May Explore Icy Moons
- NASA JPL \- Futuristic Space Technology Concepts Selected by NASA for Initial Study
- doi.org/10.1002/essoar.10511452.1 \- SWIM -- Sensing with Independent Micro-swimmers
- Zimmerman, Bonitz, and Feldman (2001) \- Cryobot: An Ice Penetrating Robotic Vehicle for Mars and Europa
文/Misato Kadono
